

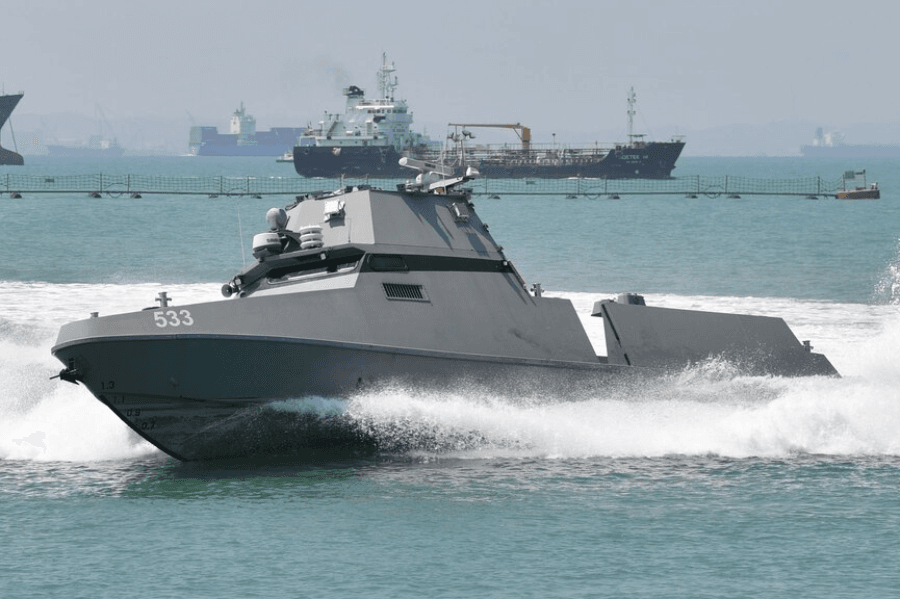
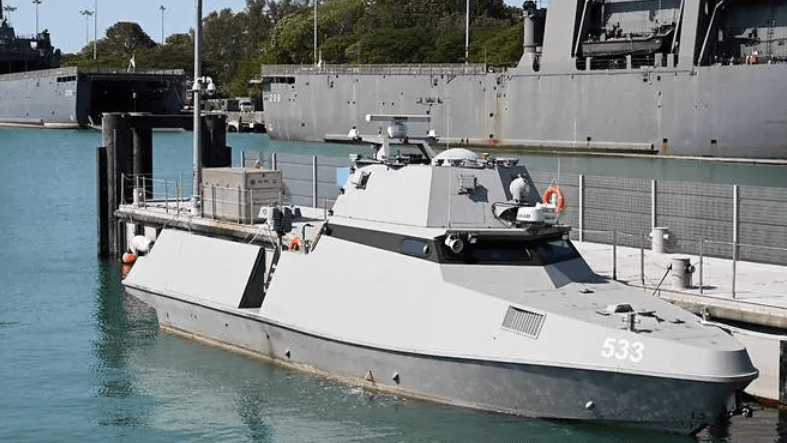
The Republic of Singapore Navy’s (RSN) Maritime Security is testing unmanned surface vessels with a locally developed, AI-driven navigation algorithm that could be used for maritime security operations in the congested but strategically essential waters. Once operational, the USVs will conduct round-the-clock patrols, investigate, and intercept suspicious vessels in Singapore waters. They are equipped with long-range loudhailers, strobe and searchlights, as well as a 12.7mm gun.
After analysing maritime traffic patterns in the Singapore Straits, the algorithm was developed and then tested in a lab environment for nine months before installation on a USV for sea trials.
The Ministry of Defence (MINDEF) said that two crew members would operate a USV from shore in a factsheet. The crew will plan and execute patrol profiles, track vessels of interest and warn or query vessels with a “user-centric” mission control system.
One crew member will focus on mission planning, like plotting patrol paths, while the other will control the USV’s payloads, such as its cameras and gun. Moving the USV is as easy as clicking on a screen.
They also develop advanced navigation and anti-collision systems to avoid obstacles and move fully autonomously in the Singapore Strait’s congested waters. The USV is not limited by a communications range, meaning it can technically be operated from anywhere.
The USVs are expected to work alongside manned vessels to “enhance the RSN’s ability to monitor and respond to situations at sea”, MINDEF said. They could also be deployed with the RSN’s newly inaugurated maritime security and response vessels.
The system uses onboard cameras and radars to ensure that the USV automatically detects and avoids obstacles at sea, like buoys, beacons and other ships. The USV will then correct its path to resume its planned route.
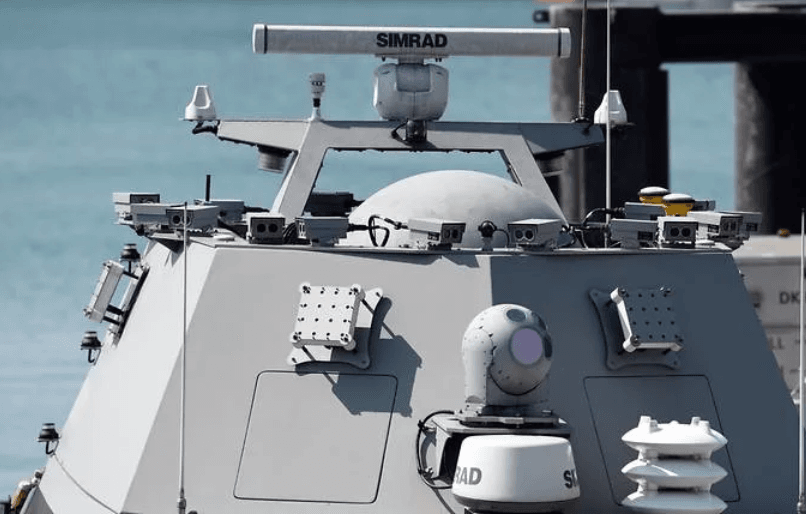
The system is also programmed to obey “traffic laws” at sea, like which direction to turn when avoiding obstacles. It integrates maritime navigation tools like charts, automatic identification systems and a differential global positioning system.










