

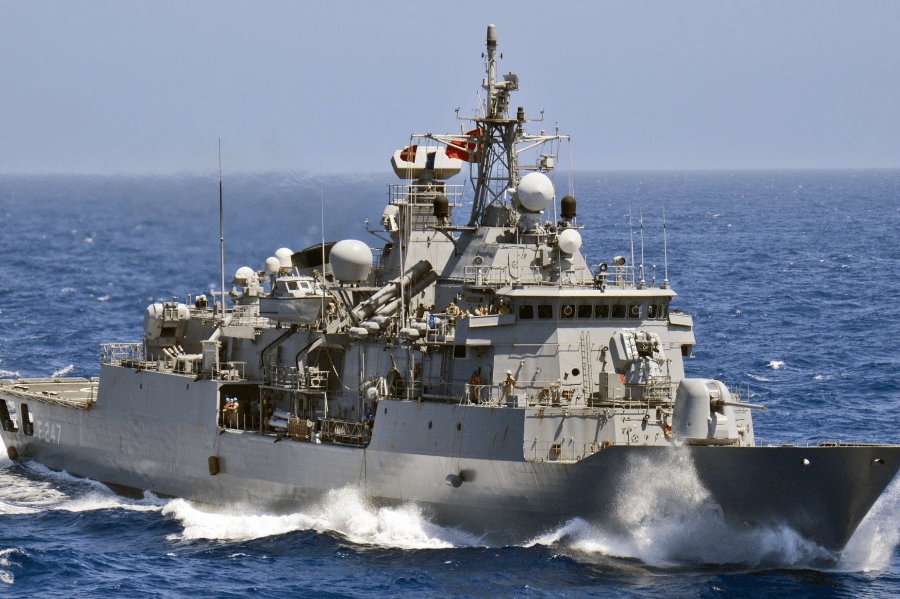
Barbaros and Gabya Class Frigates half-life modernisation project passed a new milestone. Acceptance Tests of ASELSAN’s main/auxiliary gyro systems passed acceptance tests. The marine version of the existing ANS-510 inertial navigation system is integrated into the vessels.
ANS-510 has an open architecture and hardware/ software that can be adapted to various platforms.

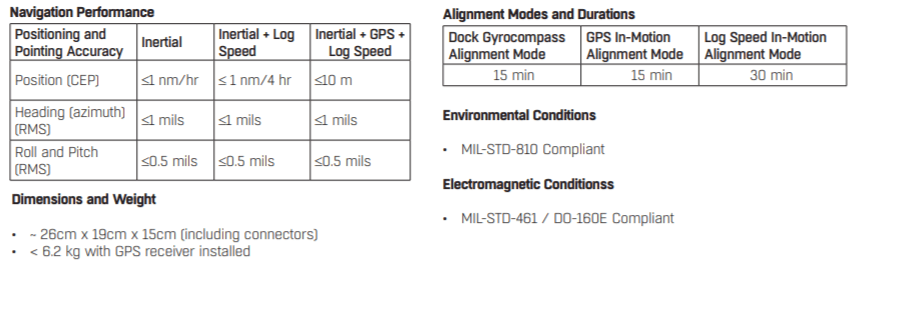
ANS-510 consists of a strap-down inertial measurement unit, system processor unit, power supply unit, Embedded GPS Receiver (EGR) and chassis. The system processor combines the GPS data with the inertial data from IMU in a tightly coupled mechanization using a Kalman filter. ANS-510 can use either SAASM compliant GPS receiver or a commercial SPS GPS receiver as an embedded GPS receiver. ANS-510 also can operate with an external GPS receiver. In the case of external GPS, the system processor combines the GPS data with the inertial data in a loosely coupled mechanization.
ANS-510 supplies linear acceleration, linear and angular velocity, position, and continuously heading to the host vehicle systems. ANS-510 provides a hybrid (inertial GPS) navigation solution, an inertial only navigation solution and a GPS only navigation solution simultaneously.
Within the project’s scope, current war systems will be replaced by the new and advanced systems developed locally and nationally by Aselsan – Havelsan Partnership following the requirements of the necessities of the time for the four BARBAROS Class Frigate registered in the Turkish Naval Force’s inventory.










